The H2CS-2 is a highly integrated and reliable camera system, designed by TSD for applications requiring remarkable processing capability embedded into the camera.
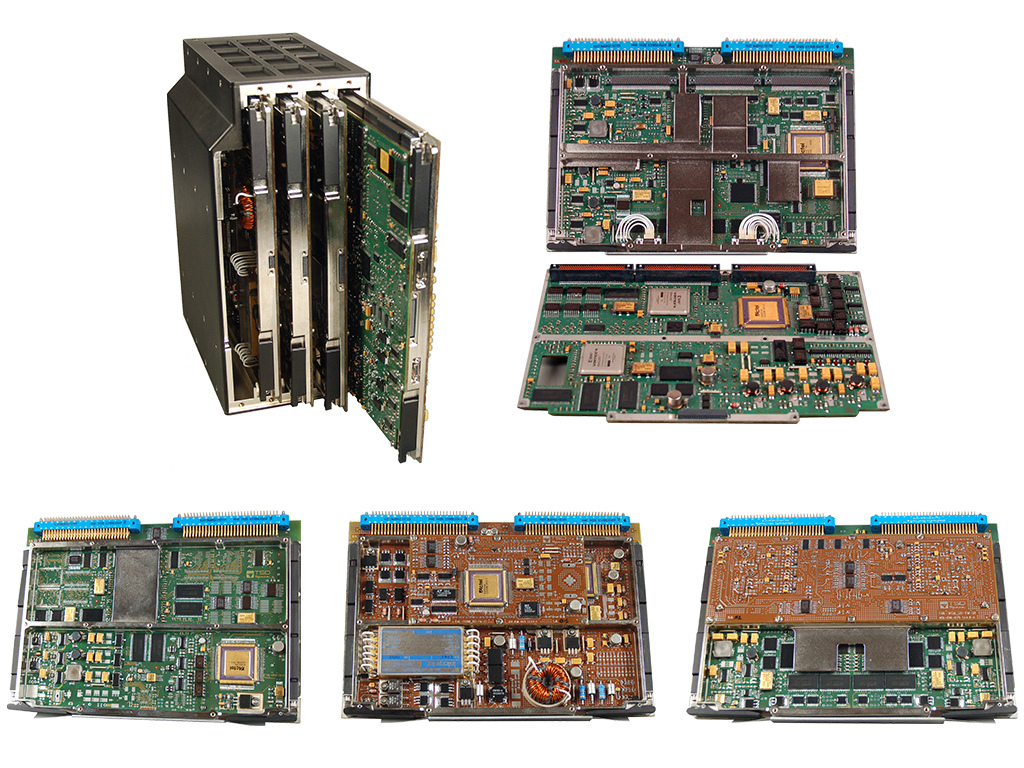
Thanks to a very innovative and unique architecture and to the adoption of last generation high density FPGAs, the H2CS-2 is able to offer a complete set of functionalities for imaging applications, including a remarkable embedded processing capability, for the implementation of processing algorithms.
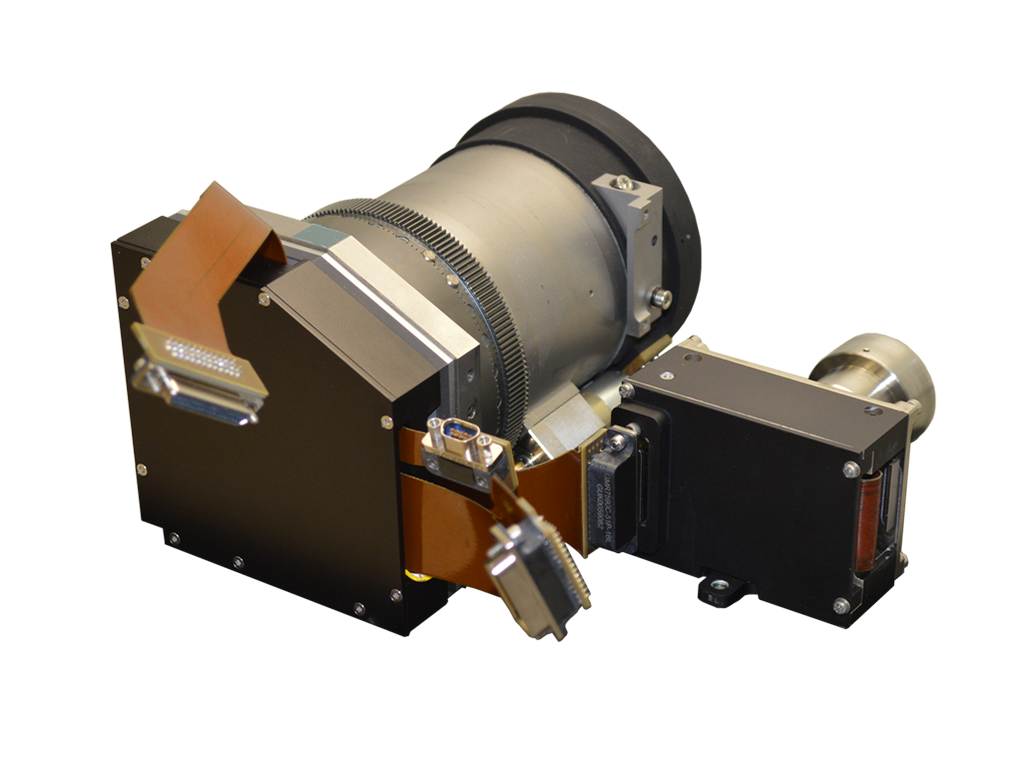
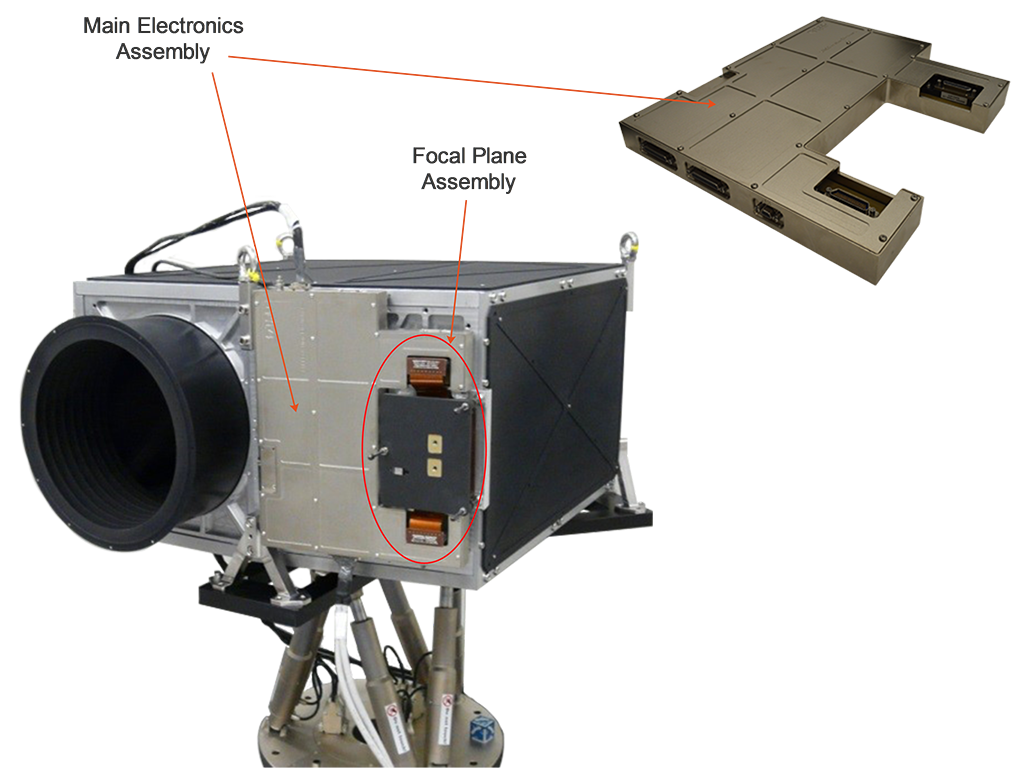
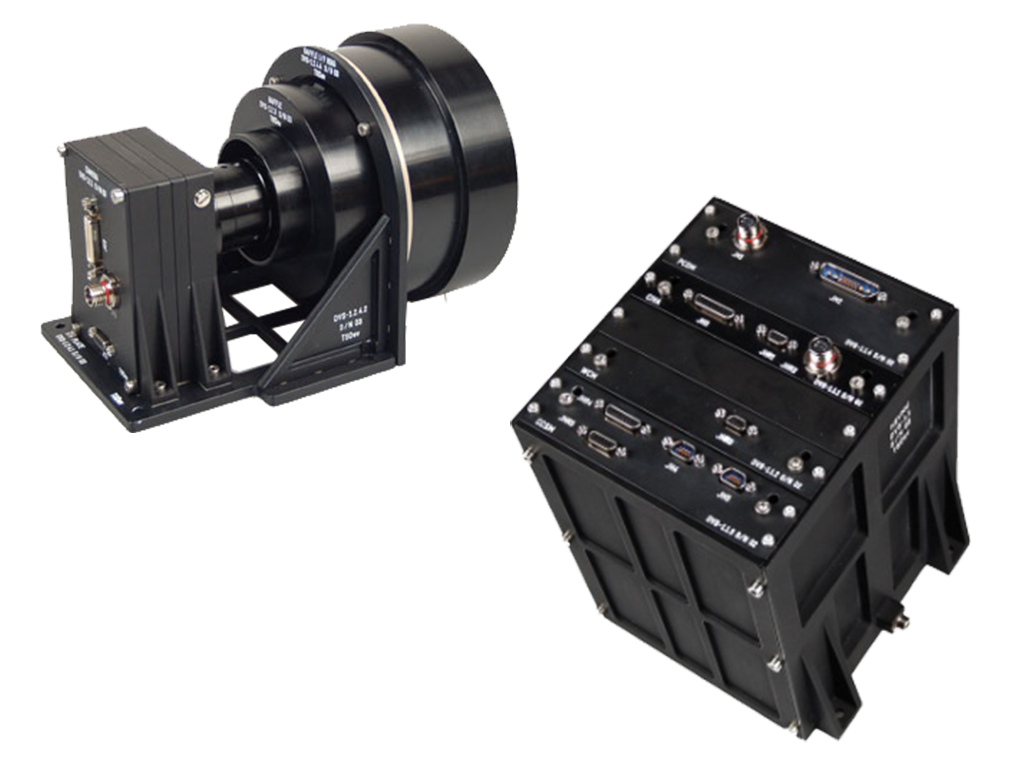
A TSD proprietary design allows the focal plane to be thermo-mechanically decoupled from the rest of the structure, thus guaranteeing a very stable positioning of the FPA with respect to the overall camera assembly.
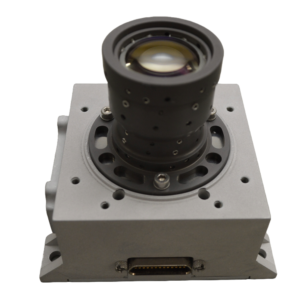
With a total power consumption of only 2.5 W, a total mass of 335 gr and a very small volume of 73mm x 73mm x 41.5mm, H2CS-2 has been conceived as a reliable and low cost product, to support imaging applications for very small satellites, such as micro- and nano-satellites. Applications requiring real-time image acquisition and processing can be carried out by using the camera system only, without requiring an external processing unit.
The camera is provided with a 4Mpixel image sensor and it is able to acquire images data with a throughput up to 80Mpixel/s at 12bit/pixel. A complete set of data interfaces, comprised of CAN, SpaceWire working up to 100Mbit/s and Camera/Channel Link up to 960Mbit/s, enables the transferring of different datasets, like navigation data to the GN&C on-board computer, compressed or uncompressed images and housekeeping data to the OBDH, by using the typical standard I/F available on board the spacecraft.