
ONGOING PROJECTS
CHEIDES
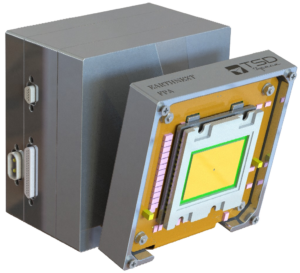
TSD is currently developing an imager named CHEIDES (Compact and High pErformance Imager for DEep Space), to be used aboard the M-ARGO mission.
M-ARGO (Miniaturised Asteroid Remote Geophysical Observer) mission is aimed at demonstrating critical technologies & operations for stand-alone CubeSats in deep space, particularly rendezvous with an asteroid and its physical characterization.
CHEIDES shall allow the CubeSat to detect and observe the target, acquiring a remarkable number of spectral bands, so to provide a global color map of the asteroid and to allow its physical characterization.
The very intensive work carried out by TSD team allowed to integrate 4 image sensors, with custom-made spectral filters and related circuitries in a very limited available volume, thus allowing the acquisition of 53 different spectral bands (from VIS to SWIR), with an overall spectral range from 500 to 2300 nm.
The following spectral bands have been envisaged:
- 9 visible spectrum bands with a 2048×2048 image sensor
- 2x 16 NIR bands with 2x 640×512 image sensors
- 12 SWIR bands with a 320×256 image sensor
As far as the Imager memory resources are concerned, 16Gbit of DDR3 RAM, 1Mbit of MRAM and 2x64Gbit of NAND Flash have been envisaged.
By considering the current design of the entire images and the elegant breadboard of the FPA and proximity electronics, recently developed, representing the most critical parts, the overall dimensions of the imager, are expected to be of 100mm x 96mm x 145mm, and an overall mass of about 1.5Kg.
The power consumption in full-performances (all channels active for imaging) is estimated to be less than 10W@5VDC, and the I/Fs implemented in the camera are:
- CAN Bus main+Redundant I/F up to 1Mbit/s for Telemetry and Telecommand transfer
- SPI main + redundant Interface up to 1Mbit/s for scientific data transfer (image)
SpaceWire main + redundant Interface up to 160Mbit/s, as high data rate alternative I/F for scientific data transfer.

EarthNext
EarthNext is an innovative 16U CubeSat, operating at an altitude between 300 and 350 km, proposing to demonstrate the viability and reveal the advantages of operating CubeSats and other small satellites in Very Low Earth Orbits (VLEOs). Taking full advantage from its proximity to the Earth, it integrates a multispectral imaging payload with high spatial resolution, developed by Officina Stellare and TSD-Space, filling the gap between airborne and spaceborne remote sensing.
In particular, TSD-Space is responsible for the development of:
- Platform & Payload Data System (PPDS)
- Camera Electronics (CE), along with the Focal Plane Assembly (FPA)
- Telecommunications Equipment
- Electrical Power Subsystem
The PPDS is a very compact, high-performance on-board unit, in charge of monitoring all of the satellite’s subsystem, implementing data handling and processing functionalities, and collecting housekeeping data and image data from the payload camera. It also includes the processing hardware for the AI algorithms developed in the context of this mission.
The PPDS is composed of the following main items:
- PCDM (Power Conditioning and Distribution Module): this module provides the conditioning of the input power from Spacecraft, in particular filtering, protection and down conversion, and distributes it to PPDS parts
- MMU (Mass Memory Unit): this module is composed of multiple Nand Flash devices, to store data processed from CDH&P and PHA
- TT&C (Telecommand, Telemetry & Control): this module decodes commands coming from Ground and routes them to CDH&P and codes the data to send to Ground
- CDH&P (Central Data Handling & Processing): this unit is part of OBC (On Board Computer) and performs the data handling and processing for the entire on board data system
- PHA (Processing Hardware Accelerator): this module is part of OBC and provides logic resources of a high density FPGA to execute in HW algorithms coded in VHDL for CDH&P
The FPA, instead, hosts a 20Mpx electro-optical sensor, provided with a multispectral filter, along with its proximity electronics, and is supported by the CE, which is responsible for the power supply to the FPA, image data acquisition and pre-processing.

SpEye
Space Eye (SpEye) is a two-satellite technology (Free Flyer and Carrier Target) demonstration mission for the in-flight validation of critical technologies and techniques related to advanced on-orbit inspection and formation-flying techniques, applicable to future operational nano-satellite capabilities and operations.
SpEye will advance the state of the art in nanosatellite GNC capabilities, adopting robust navigation techniques based on the processing of code phase and carrier phase GNSS observations, electro-optical observations, inertial measurements, and safe and efficient motion trajectories based on fuel cost, observational coverage of the target and collision avoidance.
SpEye has the objective of validating the following technologies:
- The Free-Flying Nanosatellite Inspector, capable of autonomously flying around and imaging the main satellite from which it is deployed
- A Multispectral Vision-Based Sensor System, for autonomous navigation and inspection
- A GNC Processing Unit that integrates code-phase and carrier-phase GNSS, EO and INS observations, for robust and accurate absolute and relative navigation
- A CubeSat Propulsion System that enables formation keeping and proximity operations
At the same time, such technologies will be also used to demonstrate:
- Autonomous formation flying of a nanosatellite with its carrier
- Autonomous rendezvous of a nanosatellite with a resident space object
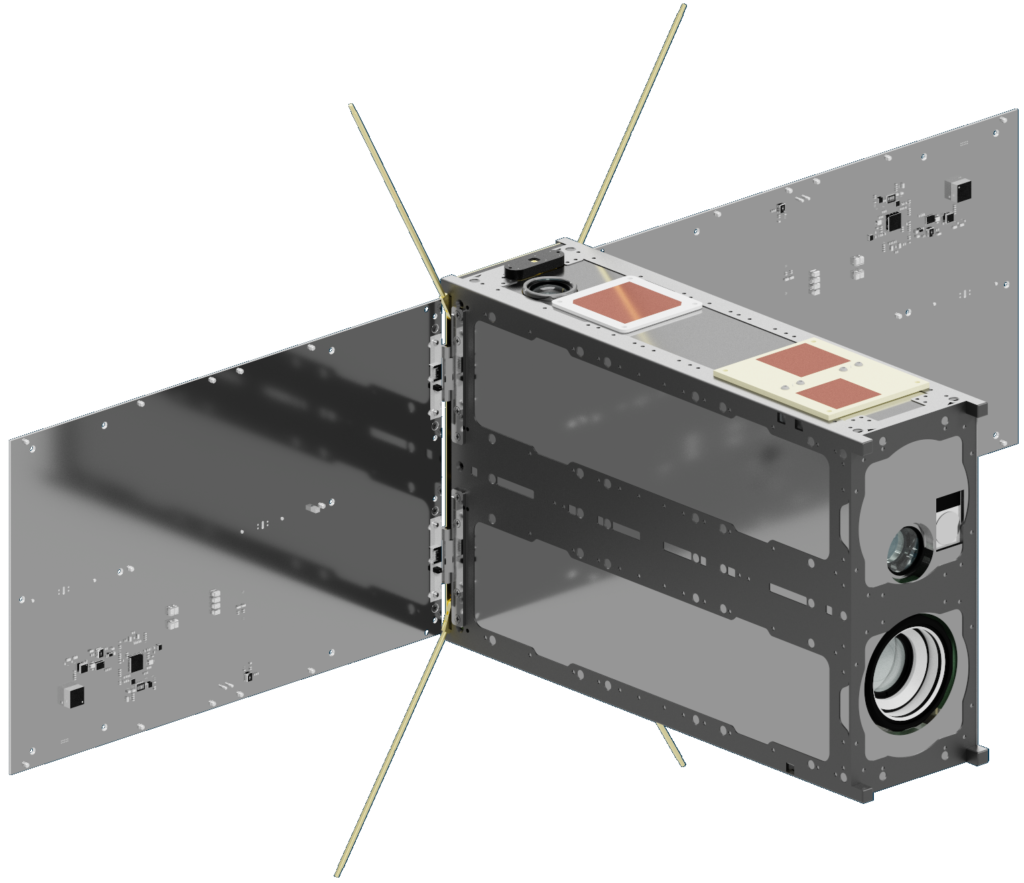
In particular, the SpEye Free Flyer is a 6U CubeSat developed by TSD-Space, while the Carrier Target is represented by an enhanced ION platform developed by D-Orbit in the context of this mission. Here it is shown the mechanical configuration of the Free Flyer.
The mission will hence validate and characterize highly compact, low-power components and proximity operations technologies, all components of the free flyer. Most of the free flyer proximity operations will be performed autonomously making use only of the available navigation observations, the on-board processor, the flight software and the highly integrated unit, specifically designed for autonomous GNC.
Free flyer and target satellite will use an inter-satellite link to share navigation data (GNSS and other data) and image data collected by the electro-optical payload (preprocessed and compressed images). Through a space-to-ground data link, the free-flyer will transmit the same data to the ground station, which will be further processed for diagnostic analysis.
Eagle-1
The QKD (Quantum Key Distribution) Processor (QPR in the following) is a key component of the Eagle-1 Satellite’s Payload, that will be the first European satellite providing a space-based quantum key distribution system for secure communications due to be launched by the beginning of 2026.
The QPR represents a cutting-edge leap in space computing technology, designed to meet on one side the extreme demands of space environment and on the other side the increasing need of processing power of modern space equipment. Built for the most challenging environments, QPR ensures that space missions can rely on unprecedented processing power, reliability and efficiency.
The QPR, even though designed for QKD applications, can be considered as a general-purpose space computing platform able to satisfy the requirements of a wide range of space missions. Key features of the QPR comprises:
- Teledyne QLS1046 Rad-Tolerant Space Module integrating an Arm Cortex-A72 quad core processor running at 1.8Ghz, bringing 30K DMIPS computing capabilities, integrated packet processing acceleration, high speed peripherals and 4GB of DDR4 memory. The QLS1046A module represents and ideal platform for compute intensive and AI applications.
- Xilinx Kintex Ultrascale XQRU060 space-grade RAM based FPGA in charge of providing high-speed serial links both internally, towards the QLS1046A and the non-volatile mass memory and to external units for high-rate data communication. Each link is implemented by Multi-Gbit transceivers, each providing 5 Gbits/s net rate and with the possibility to aggregate several links so to achieve very high speeds. Furthermore, the Kintex FPGA can host application dependent accelerated functions. For example, for its maiden flight, it will host a pseudo-random generator and expansion IP core able to output up to 22.5 Gbits/s of random data
- Microchip ProASIC RT3PE3000L space-grade Flash based FPGA that has the task to interface the S/C for telecommand and telemetry communication through a SpaceWire I/F and time synchronization by means of a PPS I/F. This FPGA also acts as supervisor of the entire QPR, by monitoring the state of the other components and intervening if off-nominal conditions are detected, e.g. by resetting the system to restore the nominal operativity;
- 1TB Flash based non-volatile mass memory that shall host the random data to be transmitted to ground. The mass memory is composed of 5 modules each of them divided in two sections. Each section is controlled by a Microchip PolarFire FPGA that also implements the Multi-Gbit link towards the Kintex FPGA. Thanks to this architecture and to TSD proprietary interleaving and parallel techniques to handle flash devices, it is possible to achieve up to 20 Gbits/s as read rate;
- SYSGO PikeOS Hypervisor is the RTOS SW platform integrated on board the QPR. PikeOS is a type-1 hypervisor well known in the avionics, automotive and space fields. It allows time-space partitioning and health monitoring of the software applications developed for the QPR in accordance with the most stringent safety and security standards;
Redundancy and risk mitigation techniques: the QPR is a full redundant unit operating in cold redundancy. Most components are rad-tolerant and the vital memories are protected by ECC and scrubbing techniques; a Soft Error Mitigation (SEM) IP core is used within the Kintex FPGA to protect the configuration memory, while Triple Modular Redundancy (TRM) is implemented into the ProAsic FPGA.

IRIDE VHR - High Performance Focal Plane Assembly and Payload Electronics for the IRIDE VHR Optical Payload
In the framework of the PNRR IRIDE VHR (Very High Resolution) Program, primed by Thales Alenia Space Italy, TSD, together with Media Lario, is developing a very high resolution Multi-spectral Electro-Optical Payload for Earth Observation.
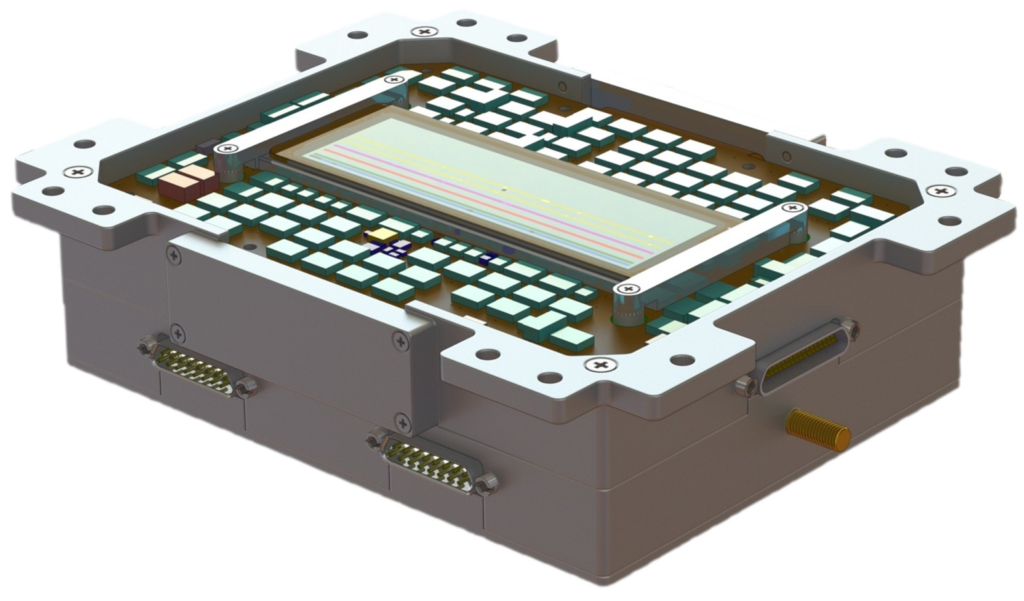
TSD is responsible for the Focal Plane Assembly (FPA) and the Payload Electronics (PE), while Media Lario is the Payload prime and responsible for the Optics.
High performances are ensured by a FPA design that embeds a cutting-edge state-of-art image sensor from Teledyne (ORBIS IC-49), allowing operations in charge domain TDI mode, up to 128 stages in Panchromatic and up to 32 stages for each spectral band.
In addition to this, VHR Payload embeds an electronics based on a consolidated multi-FPGA architecture (developed by TSD for past flight applications) and last generation technologies for data handling and processing and for Multi-Gbit high rate data communications.
The optical design is based on a 3500mm focal length telescope with 340mm of aperture.
The FPA is provided with two 12kx128 panchromatic bands and four spectral bands offering, at a nominal altitude of 460 Km, a swath of 11.3Km and a GSD of 0.92m for panchromatic images and 3.68m for Multispectral images.
Thanks to the charge domain TDI mode (up to 128 stages for PAN and 32 stages for Multispectral), it is possible to operate at very high resolution, with very good MTF, without the need to resort to large telescope apertures.
The image data transfer between FPA and PE is implemented by means of 8 (nominal) + 8 (redundant) MultiGbit data links, working in parallel and each able to operate up to 2.2Gbit/s.
The expected image data out throughput towards the Payload Mass Memory is 2.566 Gbit/s and it is ensured by 2 Multi-Gbit data links working in parallel.

ANHEO
ANHEO (Autonomous Navigation up to High Earh Orbit) is a highly integrated, low power (<15W) and very compact (<1U) system, conceived for nano- and micro-sat absolute and relative navigation, from LEO up to lunar altitudes. It is based on the elaboration of code- and carrier-phase GNSS (differential GNSS in case of cooperative target), IMU and Star Tracker observables, fused with monocular images via new AI techniques.

ARM Camera
In the framework of the IOS (In Orbit Servicing) mission, funded by the Italian PNRR and primed by Leonardo and Thales Alenia Space, TSD is supplying a binocular camera.
Such camera is going to be installed on the tip of a Robotic Arm (developed by Leonardo) that is part of the Capture & Refueling (C&R) System, which is a complex and new development aimed at capturing both collaborative/prepared and non-collaborative/non-prepared targets; the camera will be used to identify specific markers placed on the back of the satellite to be refurbished/serviced.
For such operations, the ARM camera will have a FOV of 70° with a working distance in the range [0.2m; 2.5m].
Due to the need of a reduced mass and volume, as well as a high data throughput, TSD has developed a compact and lightweight binocular camera based on the same architecture and components of the most-compact camera recently manufactured, the H2CS-3.
The ARM Camera will be based on two separated H2CS-3 cameras, with a common Power Section (but anyway with two separated space-grade DC/DC Converters) in order to keep the two eyes of the camera completely independent, thus maximizing its reliability and robustness.
Thanks to the accurate selection of COTS and to the clever architectural solutions adopted, the overall dimensional compactness of ARM Camera is brought to an overall value of 170mm x 100mm x 90mm, at a weight of only 900g.
The optimized design and the adoption of mainly automotive-grade components, together with the ProAsic3 FPGAs allow the camera to have a very low power consumption of ~6.5W @ 28VDC when in full imaging (both heads).
